4-DOF Robotic Arm for Surgical Tool Tracking
- Harita Trivedi
- Dec 14, 2024
- 1 min read
Updated: Dec 28, 2024
What:
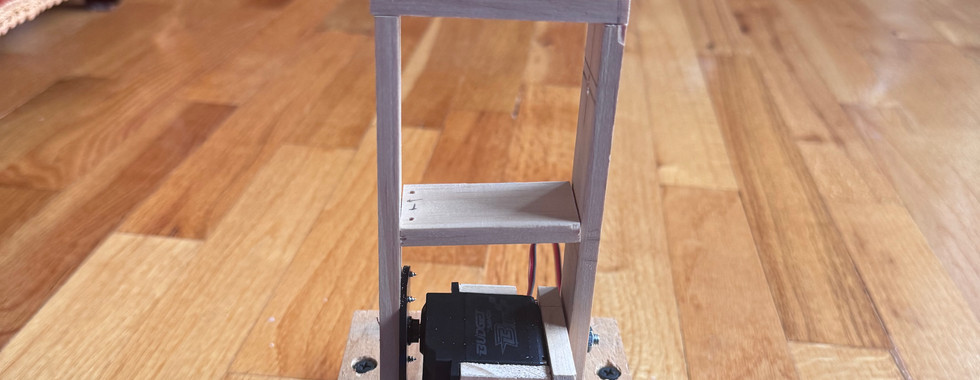
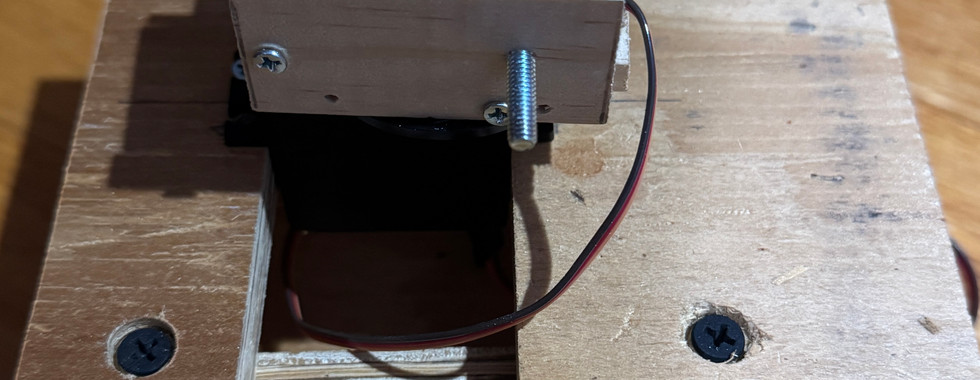
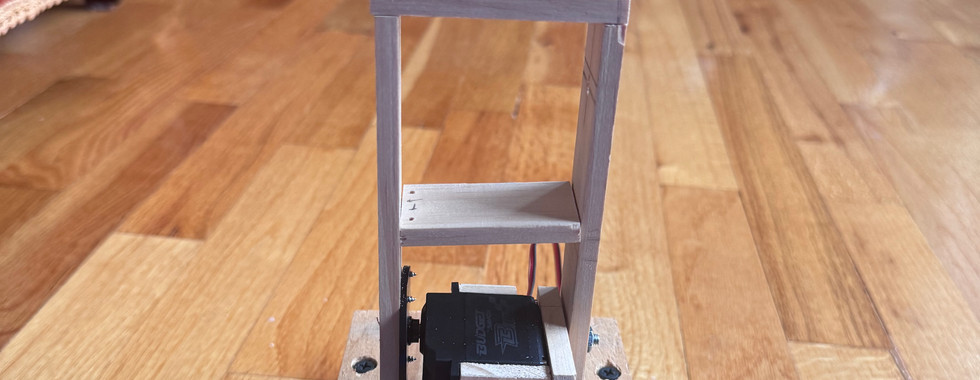
Designed and constructed a 4 Degrees of Freedom (DOF) robotic arm for surgical tool tracking applications.
Focused on creating a system adaptable for operating room settings, emphasizing precision and stability.
How:
Applied mechanical design principles to fabricate the robotic arm, ensuring it meets performance requirements for adaptability and stability.
Developed a foundation for integrating motion control algorithms to streamline surgical tool management in high-pressure environments.
Collaborated on the integration of a machine-learning algorithm (YOLO11) to detect and label surgical instruments in real-time images.
Results:
Achieved a 90% training accuracy and 66% validation accuracy with the YOLO11 model for real-time surgical instrument detection.
Created a system ready for programming and implementation, enhancing efficiency and organization in surgical environments.